Robots are becoming increasingly important in our daily lives, but in order to truly assist humans in a variety of settings, they need to be able to manipulate objects effectively. The development of cost-effective robotic grippers is crucial for enabling robots to perform dexterous object manipulation tasks. Recently, a team of researchers from Improbable AI Lab and Massachusetts Institute of Technology (MIT) have designed a new two-finger robotic gripper that aims to revolutionize everyday manipulation tasks.
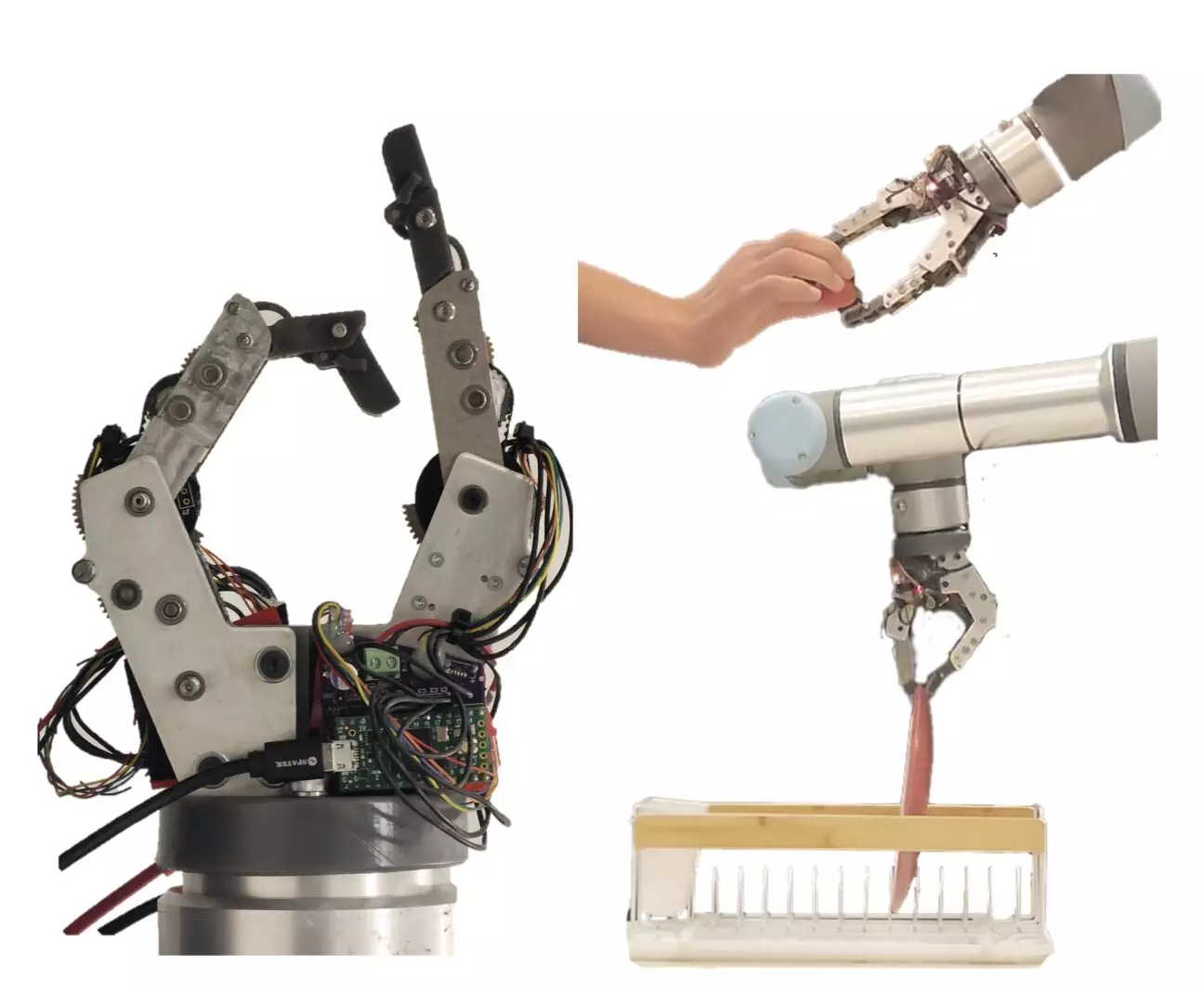
The robotic gripper developed by the researchers consists of a structure with two robotic fingers that closely resemble human fingers in size and shape. These fingers are capable of bending and tightly grasping objects, allowing the robot to pick up objects with different shapes and textures and place them in specified locations. The researchers focused on creating a compact design while ensuring optimal performance for simple everyday tasks rather than complex manual tasks.
Although the current gripper only has 2 degrees of freedom (DoF), the researchers aim to expand the design to include more fingers in the future. By adding a 3rd DoF, the researchers anticipate the possibility of creating grippers with three or even four fingers. While a full five-finger hand may require advancements in torque-dense actuators, the potential for more complex robotic grippers is on the horizon.
To evaluate the performance of their two-finger gripper, the researchers conducted real-world experiments. These experiments tested the speed, compliance, and force applied by the gripper while completing basic pick-and-place tasks. The gripper successfully handled tasks such as picking up dishes, thin objects like paper, and delicate items like strawberries. Despite the simplicity of these tasks, the results demonstrate the gripper’s potential for household robots.
The development of efficient robotic grippers is a critical step towards enhancing the capabilities of robots in everyday environments. The two-finger gripper designed by the researchers at Improbable AI Lab and MIT shows promise for simplifying daily tasks and improving the functionality of robots in various settings. As technology continues to advance, the potential for more sophisticated robotic grippers with additional fingers and capabilities is within reach. By continuing to innovate and refine their designs, researchers can unlock the full potential of robotic manipulation in the future.
Leave a Reply