For humans, engaging in tasks that seem ordinary, like retrieving a book from a shelf, is usually a seamless experience. However, beneath this simplicity lies a labyrinth of cognitive operations. Our brains adeptly plan and navigate through a web of obstacles, managing complex sensorimotor integration in real time. Unfortunately, when it comes to robotic movement, replicating such fluidity in unfamiliar environments has proven to be a daunting challenge for researchers. The field known as motion planning seeks to equip robots with the capability to transport objects while avoiding collisions; however, the traditional algorithms employed can be computationally expensive and slow, thereby limiting a robot’s effectiveness in unpredictable surroundings.
A revolutionary approach developed by a team at Carnegie Mellon University, dubbed Neural Motion Planning, addresses these challenges head-on. This innovative model leverages the power of artificial intelligence to enable robots to adapt their movements dynamically, even when faced with uncharted territories like cluttered kitchens or cramped storage spaces. “In scenarios where you deploy robots, the unpredictability of the environment poses significant hurdles,” notes Murtaza Dalal, a doctoral student at the Robotics Institute. Traditional motion planning methods falter as they require extensive computational checks concerning potential collisions, rendering them inefficient in real-time applications.
Neural Motion Planning draws inspiration from human learning paradigms, a methodical accumulation of experiences leading to improved skills over time. It allows robots to transition from cautious, slow movements to swift, precise actions as they gather insights from their surroundings. This adaptability not only enhances their efficiency but also broadens their operational scope, enabling them to tackle diverse tasks across different environments.
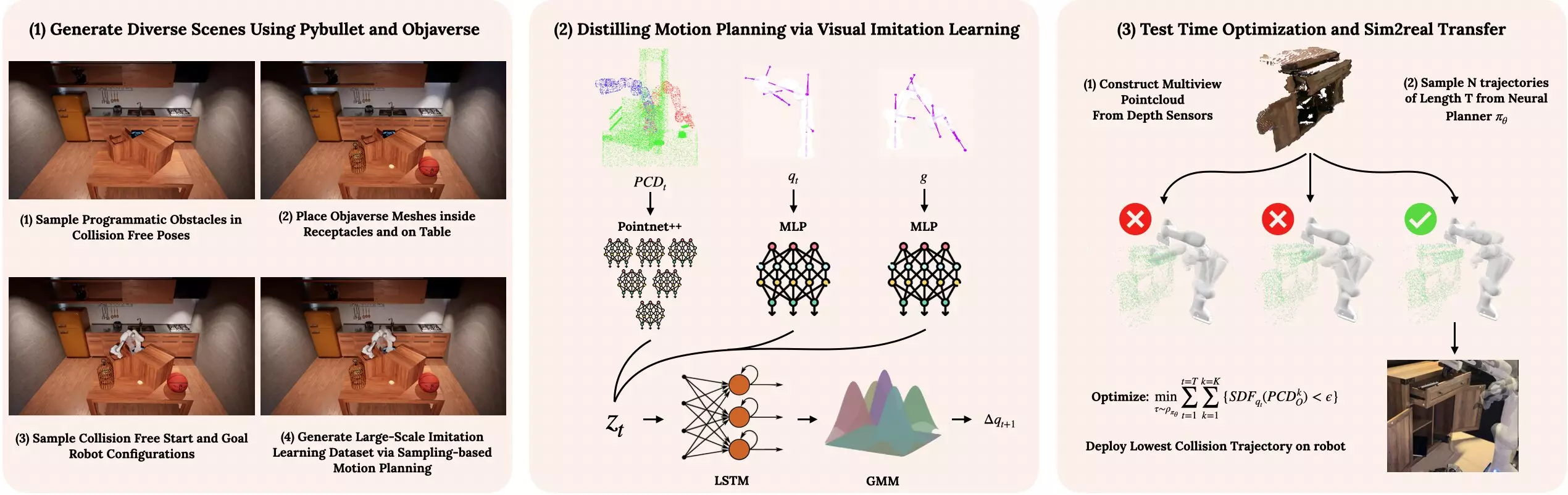
The developmental backbone of Neural Motion Planning involves extensive simulation of millions of complex household scenarios. These virtual settings replicate a variety of layouts that robots may encounter, including objects as innocuous as cabinets and as dynamic as curious pets. By facing these simulated challenges, the robots accumulate training data that allows them to refine their reactive motion planning abilities. This training culminates in the creation of a generalized policy that empowers the robots to perform efficiently, even in real-world settings that differ from their training environments.
Deepak Pathak, the Raj Reddy Assistant Professor at the Robotics Institute, emphasizes the potential of this method, likening it to the significant advances seen in fields like computer vision and natural language processing. “We have witnessed impressive strides in machine learning for vision and language, but robotics has remained a frontier yet to be fully explored. Neural Motion Planning represents a significant leap forward, utilizing large-scale learning from simulated environments to achieve remarkable adaptability in real-world situations,” he elaborates.
The practical tests of Neural Motion Planning on robotic arms in laboratory settings have demonstrated the model’s efficacy. When equipped with a 3D representation of their environment, created through depth cameras, the robots could navigate around various obstacles, such as lamps and cabinet doors, to achieve designated goals efficiently. Jiahui Yang, a master’s student at the Robotics Institute, expressed her enthusiasm: “It was exhilarating to witness the robot navigate effortlessly through diverse household obstacles, showcasing a remarkable level of dexterity and intelligence.”
This breakthrough in robotics holds profound implications beyond household chores. As industries increasingly integrate automation, the ability of robots to adapt fluidly to unpredictable environments could revolutionize sectors ranging from manufacturing to healthcare. Robots capable of learning and reacting dynamically will enable streamlined operations, enhancing productivity and efficiency while reducing the risks associated with automation in human-centric spaces.
The research surrounding Neural Motion Planning illustrates not only a significant milestone in robotic technology but also hints at an exciting future where machines become more attuned to human environments. Embracing principles of learning and adaptability, this progress signifies a shift towards smarter, more capable robotics that align better with the daily tasks and challenges faced by people. As these technologies evolve, we stand on the cusp of witnessing a robotic revolution that promises to make interaction with machines as intuitive and seamless as it is with each other.
Leave a Reply