In recent years, the capabilities of unmanned aerial vehicles (UAVs), or drones, have expanded significantly, demonstrating their utility in diverse applications ranging from environmental monitoring to urban planning. Among the latest advancements in this field, the SOAR system, developed by researchers from Sun Yat-Sen University and Hong Kong University of Science and Technology, stands out. With its focus on enhancing the efficiency and quality of 3D environmental reconstructions, SOAR marks a pivotal step towards the autonomous exploration and mapping of real-world settings.
Understanding SOAR: A Systematic Approach to UAV Coordination
The primary aim of SOAR is to design a heterogeneous multi-UAV system that takes advantage of both LiDAR and visual sensors to gather extensive data concurrently. By employing a dual approach, the researchers seek to maximize the effectiveness of their UAVs, enabling them to work cohesively in unfamiliar environments. Mingjie Zhang, a key contributor to the research, highlighted the necessity for innovative solutions that address the inherent limitations of existing techniques. Traditional methods are often either reliant on pre-existing models—making them time-consuming—or overly constrained by local planning.
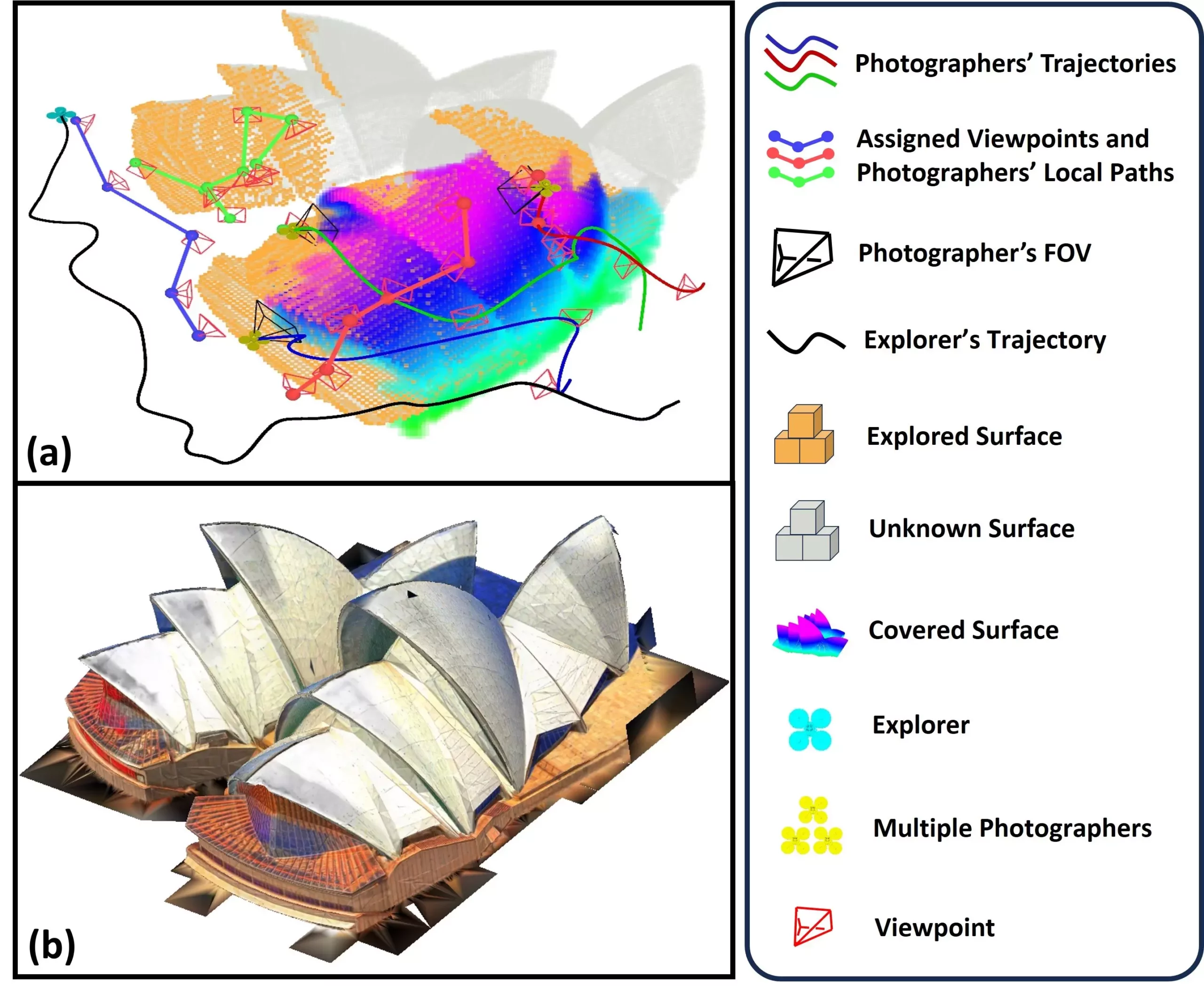
SOAR’s architecture is innovative; it comprises an “explorer” UAV responsible for navigating and capturing the environmental layout using LiDAR technology, complemented by several “photographer” UAVs, which are tasked with taking high-resolution images. This systematic division of labor not only enhances the overall efficiency but also ensures that the environmental mapping is both comprehensive and detailed.
At the heart of SOAR’s strategic accomplishment is its algorithm for incremental viewpoint generation. This mechanism allows the system to adapt dynamically to forthcoming data collection needs as environments are explored. The researchers have integrated a Consistent-MDMTSP method for task allocation that balances the workload among UAVs while maintaining consistency in data collection efforts. This approach is critical for ensuring that all relevant areas within the specified environment are documented, thereby facilitating meticulous 3D reconstruction.
As the explorer UAV identifies new surfaces, it incrementally generates optimal viewpoints based on the data gathered. The photographer UAVs are then directed to these viewpoints, where they collect visual information essential for constructing a textured 3D model. This partitioned task execution underscores the system’s sophistication and ability to operate under dynamic conditions.
The research team conducted extensive simulations to test SOAR’s efficacy against existing state-of-the-art reconstruction methods. The results were illuminating—the proposed system exhibited superior performance, demonstrating its viability for real-time applications. Zhang expressed confidence in their unique framework emphasizing the importance of developing algorithms with an incremental design philosophy. This design is particularly crucial for balancing the demands of real-time planning with the overarching goal of efficient data collection.
The implications of successfully implementing SOAR are profound. Beyond academic and technical advancements, this technology could transform how urban planners, historians, and disaster response teams approach their respective fields. For instance, rapid and accurate 3D modeling can aid in urban development projects, allowing planners to visualize changes within the cityscape effectively. Similarly, historians could utilize this technology to digitally reconstruct and preserve cultural heritage sites.
Future Directions and Challenges
Looking ahead, the potential applications of SOAR span several industries, from infrastructure inspection to gaming design. The system is also poised to be a valuable tool in disaster management scenarios, where rapid assessments of affected areas can inform rescue and recovery strategies. However, the transition from simulation to real-world deployment poses significant challenges. Zhang and his colleagues recognize the “Sim-to-Real Gap,” which encompasses localization errors and communication challenges during UAV operations in unpredictable environments.
To tackle these challenges, future research will focus on refining task allocation strategies to further streamline cooperation among UAVs while enhancing environmental mapping speed. Additionally, integrating modules for scene prediction and real-time feedback into the system promises to revolutionize how UAVs adapt during missions, improving both the quality and efficiency of ongoing data collection.
SOAR represents a crucial advancement in UAV technology, merging various methodological strengths to create an efficient and adaptable system for environmental reconstruction. Continued research and development hold significant promise for overcoming current limitations, potentially establishing SOAR as a cornerstone in the field of autonomous aerial mapping. This ongoing evolution will undoubtedly contribute to more advanced applications, enabling breakthroughs across a wide array of disciplines.
Leave a Reply