Imitation learning has been a promising approach to teaching robots how to perform various tasks. However, a major challenge has been the requirement for detailed human demonstrations to enable robots to replicate specific movements accurately. Existing teleoperation systems have struggled to capture the complexity and coordination involved in human movements. In response to this challenge, researchers at the University of California, San Diego have developed Bunny-VisionPro, a groundbreaking system that facilitates the teleoperation of robots for bimanual dexterous manipulation tasks.
One of the key advantages of Bunny-VisionPro is its ability to enable the teleoperation of a robotic system in real-time while providing users with visual and haptic feedback. This combination of immersive feedback not only enhances user experience but also ensures the safe control of the robot and prevents collisions with surrounding objects. Moreover, Bunny-VisionPro is designed to be portable, lightweight, and easy to deploy in laboratory settings, making it a practical solution for collecting demonstrations in robotics labs.
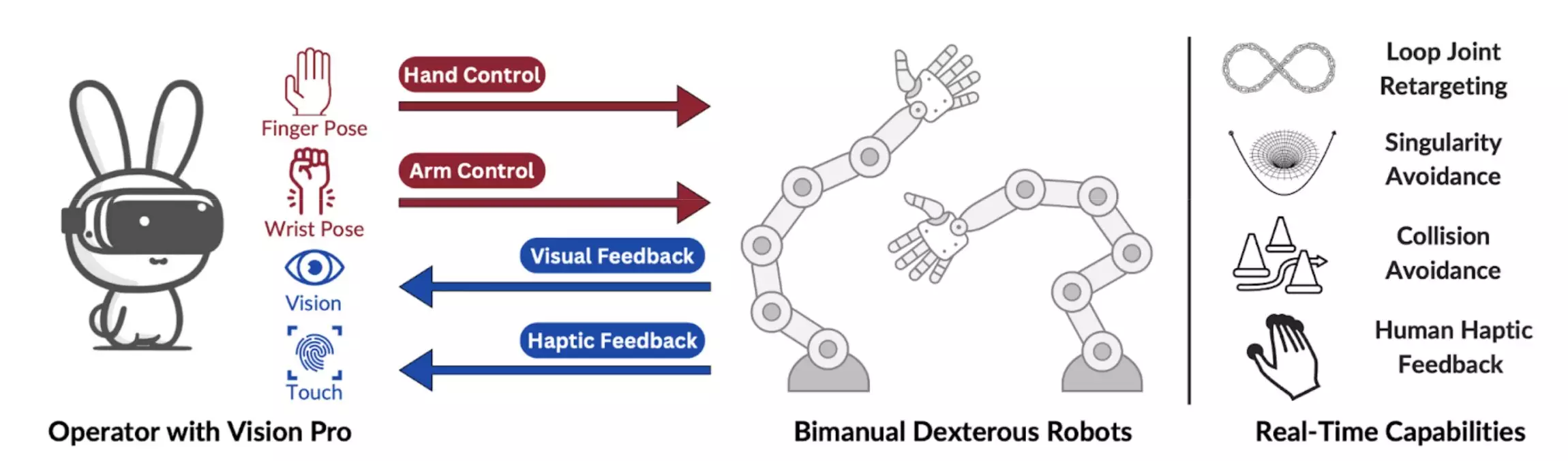
The Bunny-VisionPro system comprises three essential components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. These components work together to enable human operators to control dual robot arms and multi-fingered hands seamlessly in real time. The arm motion control module handles singularity and collision issues, while the hand and motion retargeting module maps human hand poses to robot hand poses with support for loop-joint structures. Additionally, the haptic feedback module transfers tactile sensing from the robot to human users through advanced algorithmic and hardware design.
Enhancing Teleoperation Success Rates
Unlike previous teleoperation systems, Bunny-VisionPro integrates haptics and visual feedback to improve the teleoperation success rates, making the process more intuitive and immersive for users. By enabling real-time control of bimanual robotic systems with minimal delay, collision avoidance, and singularity handling, Bunny-VisionPro ensures safety and performance in real-world robotic applications. This breakthrough in teleoperation technology paves the way for more efficient and reliable collection of demonstrations for imitation learning frameworks.
Future Implications of Bunny-VisionPro
The development of Bunny-VisionPro has the potential to revolutionize the field of robotics by simplifying the use of teleoperation for collecting demonstrations. As this system gains traction in robotics labs worldwide, it could inspire the creation of similar immersive teleoperation systems. Future studies aim to leverage the tactile information from robots to enhance manipulation capabilities, further improving precision and adaptability in robotic tasks. The continued advancement of Bunny-VisionPro and similar technologies holds great promise for the future of robotic learning and automation.
Leave a Reply