For nearly seven decades, the field of robotics has advanced dramatically, yet the underlying technology has remained largely unchanged. Traditional robots, whether utilized in industrial settings or research environments, primarily rely on electric motors, a technology that predates modern robotics by two centuries. Despite achieving varying levels of functionality and efficiency, these motor-driven designs have significant limitations, particularly when it comes to mimicking the fluidity of natural movement observed in biological systems. A recent breakthrough from researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems aims to change this paradigm by introducing a new muscle-powered robotic leg that promises both improved energy efficiency and enhanced adaptability.
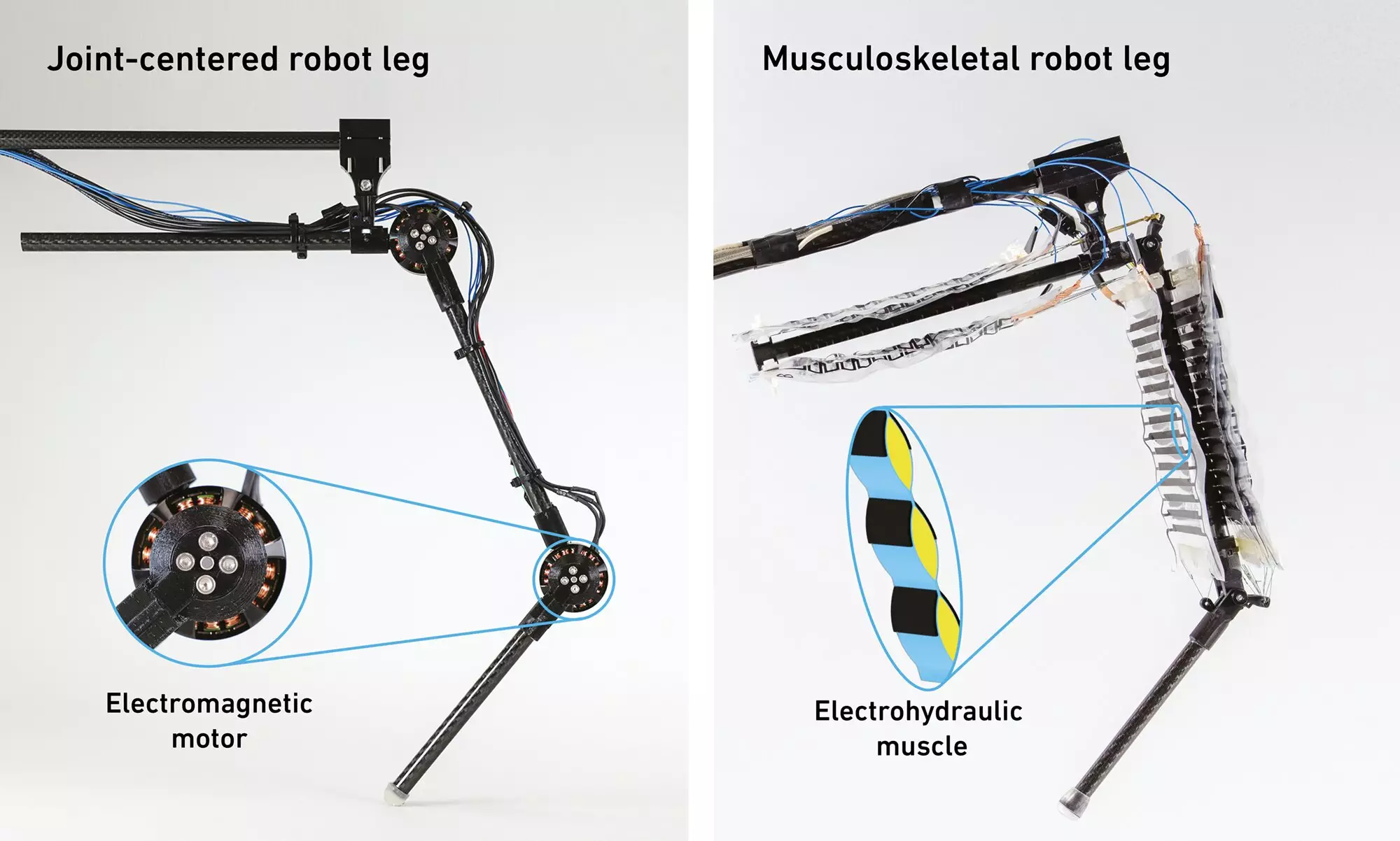
The newly developed robotic leg is not just another iteration of an existing design; it fundamentally rethinks how robotic systems can be powered. Traditional robots with motors lack the capacity for high-speed actions and flexibility unless equipped with complex sensors and intricate control systems. In contrast, the muscle-inspired leg developed by the research team employs electrohydraulic actuators—referred to as HASELs—which function in a manner akin to biological muscles. These actuators consist of oil-filled plastic bags that expand and contract in response to electrical signals, simulating the way muscles interact with tendons in living creatures.
This innovative approach leads to a significant reduction in energy consumption. In conventional robotic systems using electric motors, a considerable amount of power is lost as heat, requiring additional components for cooling. However, the electrostatic nature of the HASELs allows the robotic leg to maintain an efficient temperature profile, even during prolonged use. This efficiency not only stands out in laboratory tests but also opens potential applications where weight and power consumption are critical factors.
Functional Versatility: Mimicking Nature
One of the standout features of this newly engineered robotic leg is its remarkable ability to perform actions that resemble those of living organisms, such as jumping or rapidly adapting to different terrains. By employing a musculoskeletal system with extensions and flexors, the robotic leg can execute dual-directional movement much like human limbs. This capacity for quick adaptations allows it to handle varying environments without needing an extensive suite of sensors. The implications for robotics in unstructured environments—like navigating through rubble or uneven terrain—could be immense.
As articulated by lead researcher Robert Katzschmann, the design philosophy behind this robotic leg hinges on understanding and implementing the principles found in nature. By being responsive to its surroundings through simple input signals, rather than a continuous feedback loop typical of sensor-laden designs, the leg is empowered to adjust its posture instinctively. This reflects the innate behaviors seen in animals when landing from a jump—a capacity to adapt without the burden of conscious calculation.
Although progress has been made, the technology remains in a nascent stage. Katzschmann notes that the robotic leg, while capable, is still tethered to a rigid structure that restricts its freedom of movement. It cannot yet traverse independently, which is a crucial milestone for practical applications. Furthermore, even though this muscle-powered design excels in energy efficiency and adaptability, its potential in more complex tasks—such as navigating unpredictable terrains or performing intricate maneuvers—remains largely unexplored.
The interdisciplinary collaboration between ETH Zurich and MPI-IS reflects an understanding that future advancements in robotics require not just improved software and control systems, but equally novel hardware designs. As the researchers aptly point out, the field of electrohydraulic actuators is still emergent, but it holds incredible promise for the next generation of robotic systems. Expanding research in this domain could lead to breakthroughs that enable robots to better integrate into everyday human environments, enhancing their utility in sectors like healthcare, manufacturing, and beyond.
As robotics continues to evolve, the debate over the best methodologies for design and operation is becoming more pronounced. Innovations like the muscle-powered robotic leg showcase the potential for disrupting traditional paradigms, urging researchers and engineers to re-evaluate what it means to create machines that can mimic life. While muscle-powered systems may not yet replace electric motors for all applications, they certainly represent a compelling alternative for specific use cases that demand agility and efficiency.
Moving forward, researchers must focus not only on refining muscle-powered systems but also on overcoming current limitations, ultimately unlocking the full potential of robotic limbs that can walk, jump, and traverse complex environments independently. As this research progresses, it could usher in a new era of robotics, where machines not only operate alongside humans but also move with the same grace and adaptability inherent in nature. Whether this path leads to a harmonious coexistence of muscle and motor in robotics remains to be seen, but the groundwork has undeniably been laid for a revolution in how we conceive and construct our robotic future.
Leave a Reply