Roboticists around the world have been working tirelessly to design robotic grippers capable of picking up and manipulating various objects. However, many of the grippers currently available are inspired by human hands and are thus complex and expensive to build and program. While these grippers perform well in intricate object manipulation tasks, their high degree of freedom and advanced mechanisms can make them impractical for widespread deployment in energy-efficient and cost-effective robots.
Researchers from Purdue University and MIT have developed a simpler yet equally effective robotic gripper that bridges the gap between high DOF dexterous hands and traditional one DOF grippers. This new gripper has only 5 DOF, making it easier to control through programming tools while still being able to perform human-like in-hand manipulations. By integrating a vision-based tactile sensor, the gripper can collect sensory data that enhances its ability to grasp and manipulate objects effectively.
The newly designed gripper consists of two fingers attached to a gripper base. Each finger is equipped with a linear actuator and a rotational servo motor, providing a total of 5 DOFs for the gripper. The gripper’s fingers are made from PLA material using 3D printing, while a GelSight mini vision-based tactile sensor is mounted at the fingertip of one of the fingers. This sensor provides vital information about the geometry, orientation, and grip force of the object being grasped.
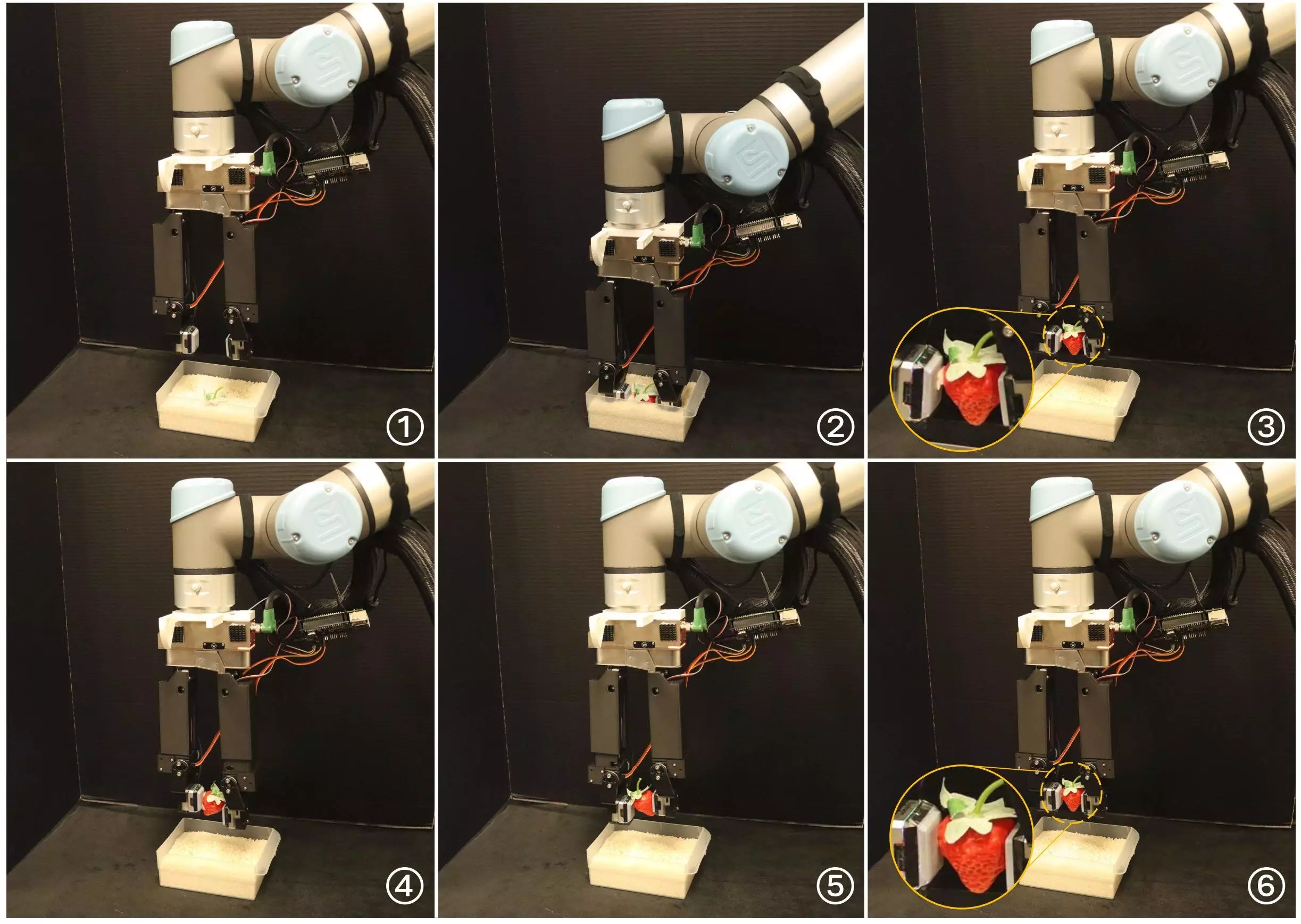
Despite its simplicity, the gripper developed by the researchers has shown remarkable performance in real-world experiments. It successfully completed complex object manipulation tasks such as singulation and scooping, surpassing the capabilities of grippers with fewer DOFs. The gripper’s ability to mimic human-like motions, such as rubbing sand particles from an object’s surface, demonstrates its potential in handling a wide range of tasks that require dexterity and precision.
The introduction of this new robotic gripper opens up possibilities for developing cost-effective and efficient robotic solutions for complex object manipulation tasks. Its simplified design and ease of control could pave the way for the creation of more robust and energy-efficient robots that are simpler to implement and maintain. As the researchers continue to explore the capabilities of this gripper, its application in challenging manipulation tasks could revolutionize the field of robotic grippers and inspire the development of similar systems in the future.
Leave a Reply