The elephant’s trunk is not just a remarkable anatomical feature; it is a powerhouse of functionality and dexterity. Containing an intricate arrangement of approximately 17 muscles and aided by tens of thousands of muscle fibers, the trunk serves a myriad of purposes. From grasping food to spraying water, and even aiding in social interactions within elephant herds, the trunk’s versatility is astonishing. However, this biological marvel also symbolizes a wealth of potential for advancements in robotics.
Researchers from Stanford University and the University of Oxford have turned their attention to this organic complex to inspire engineering innovations. Their goal: to replicate the trunk’s ability to maneuver with finesse and accuracy while minimizing the complexity typically associated with robotic appendages. Through a blend of mathematics and engineering, they have successfully demonstrated that the elephant trunk’s multitude of functions can largely be reproduced using a surprisingly minimal number of components.
Breaking Down the Mechanics
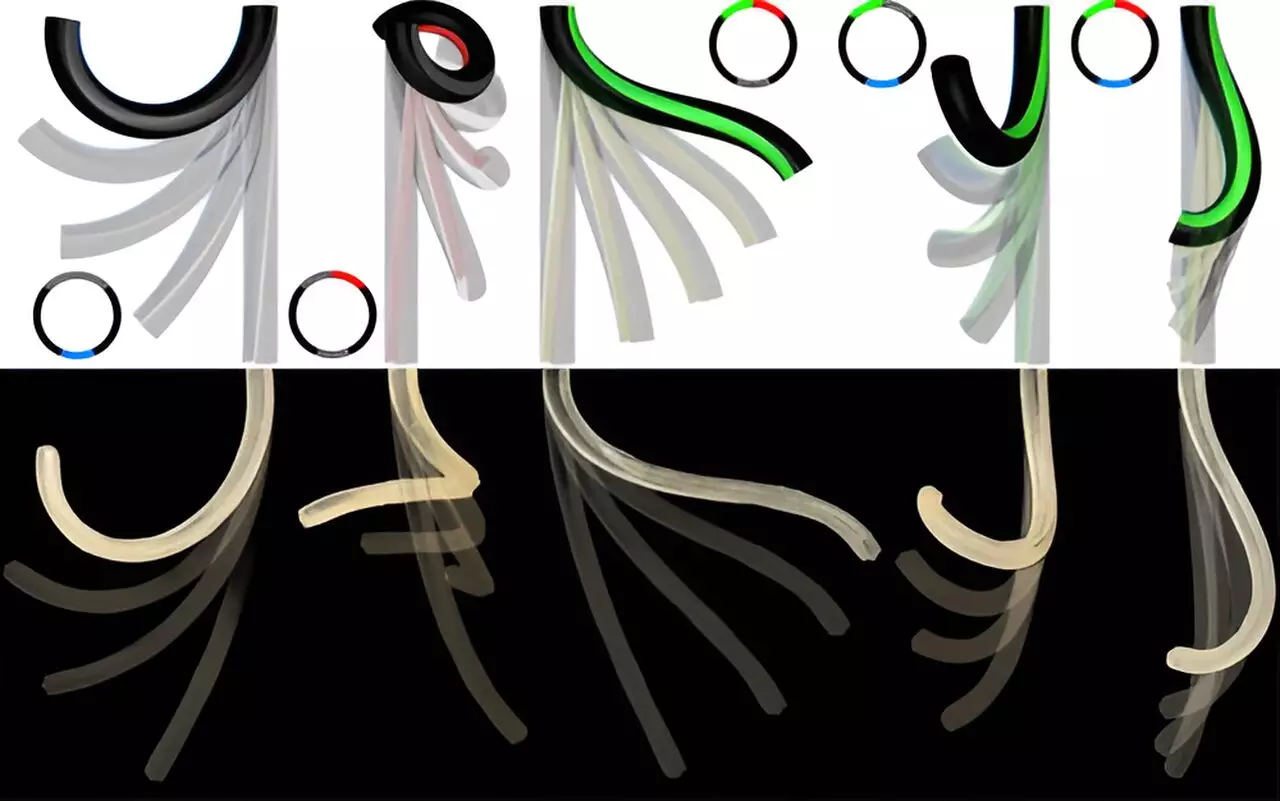
At the heart of the researchers’ endeavor lies a unique interpretation of how muscle structures can inform mechanical designs. Traditionally, robotic systems have relied heavily on multiple actuators to achieve even basic motion capabilities. However, this research team’s findings challenge that convention. By harnessing just three “muscles”—a longitudinal actuator and two helical actuators—engineers were able to create a mechanical model that mimics the elephant trunk’s impressive range of motion.
The research, published in the journal *Physical Review Letters*, emphasizes that not only does the model replicate the trunk’s movements—such as bending and twisting—but it also does so with enhanced efficiency. The mathematical framework they developed indicated that such a design could produce a spectrum of motion using far fewer components than traditional robotics. The implications for this are profound: simpler robotic designs could lead to applications that are cost-effective and easier to maintain.
Versatility Through Minimalism
A critical aspect of this study is the concept of “reachability” – the three-dimensional space that the robotic trunk can access. The innovative model showcased a reachability cloud that encompassed a full 360-degree arc around its structure. This wide range of motion enables the robotic trunk to engage effectively with its environment, much like its biological counterpart. The research team’s simulations showed that compared to traditional designs with multiple longitudinal or helical actuators, their minimalistic approach provided superior flexibility, reach, and maneuverability.
This realization not only lays the foundation for more agile robotic systems but opens pathways for a wider array of uses. Imagine robots that can navigate complex spaces, avoid obstacles, and manipulate objects—tasks generally reserved for human-like dexterity—enhanced by the streamlined designs inspired by the elephant’s trunk. This shift also mirrors broader trends in engineering toward biomimicry, a movement towards drawing inspiration from nature to solve human challenges.
From Theory to Application
The practical applications of this research extend well beyond the laboratory. In industrial settings, where robots play increasingly critical roles, such advancements could lead to more adaptable robotic arms used in production lines, construction, and even healthcare. The ability to replicate the fine motor skills of an elephant trunk could lead to significant improvements in tasks ranging from assembling intricate machinery to performing delicate surgeries.
Moreover, the methodology developed in this study could serve as a blueprint for future research into soft robotics, potentially leading to the creation of machines that are not only functional but also safe in environments where human interaction is common. By prioritizing flexibility and a more natural range of motion, these robots could work alongside humans without the risk of injury often posed by rigid robotic systems.
Limitations and Future Prospects
While the innovative design presents exciting opportunities, the research indicates that certain limitations still exist. For instance, the model cannot elongate or shorten, which could be a crucial feature in various operational settings. Additionally, understanding the range of loads and the efficiency of motion handling for different scenarios is an area that warrants further exploration.
Nevertheless, the findings from this research illuminate a promising path forward for robotic technology. By learning from nature and applying such fundamentals to engineering, we can expect designs not just to mimic animal movements but potentially to exceed them in sophistication, efficiency, and application. The elephant’s trunk, a graceful yet powerful appendage, thus serves as a guiding light for innovation in the realm of robotics, urging engineers to envision a future where machines adapt to meet both simple and complex challenges with the elegance of nature.
Leave a Reply